Autonomous vehicles may become common by 2040, but trust and safety on college campuses remains a major challenge. Campuses are high-interaction environments dense pedestrian traffic, bikes and scooters, frequent distractions, and unpredictable group behavior. Our team partnered with Johns Hopkins Applied Physics Laboratory (APL) to explore how autonomous systems can coexist with campus road users in a way that feels safe, understandable, and realistic to deploy.
The Problem
As AVs become more prevalent, it’s not enough for them to be technically capable. They need to be trusted by the people around them.
On campuses, we saw unique risks:
vulnerable road users (pedestrians, cyclists, scooter riders) moving unpredictably
widespread rule-bending (crossing without walk signals, jaywalking, “herd mentality”)
distracted behavior (headphones, phones) and fast-moving micromobility
limited communication between vehicles and pedestrians beyond basic traffic signals
In an autonomous future, these patterns could amplify confusion and reduce trust if AVs don’t communicate clearly or adapt to real campus behavior.
My Role
I served as a UX Researcher, balancing design execution with team coordination. I helped guide our process across milestones, kept deliverables aligned to the core “safety + decision-making” question, and mentored younger designers through critiques, iteration, and synthesis. I also contributed directly to research framing and translated findings into concrete design and policy recommendations.
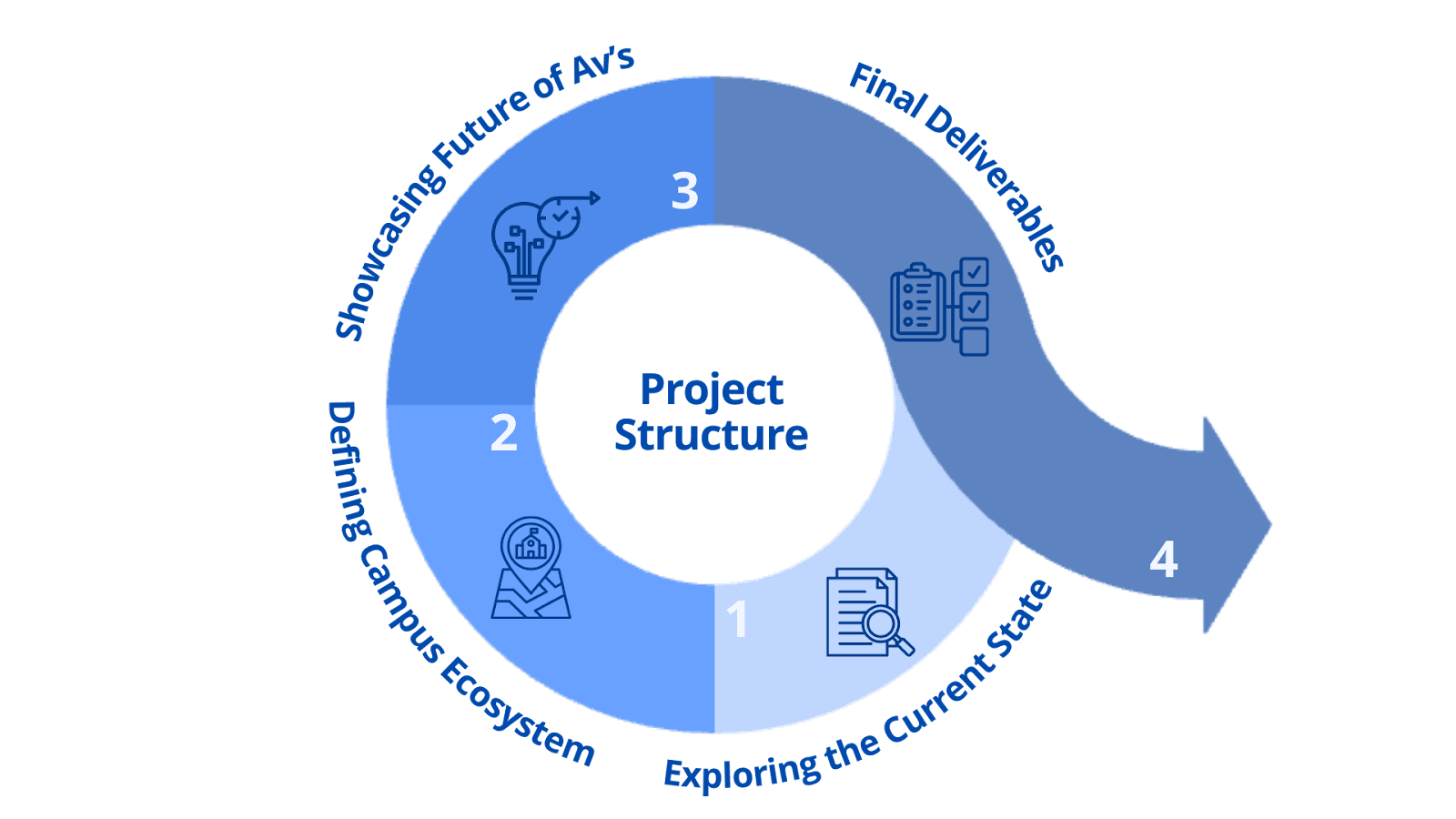
Our Approach
We used an iterative, non-linear process across three phases:
First, we built a foundation through research on AV technology, perception, and policy. Next, we validated assumptions by studying real campus behavior at Purdue. Finally, we designed a future-facing solution set that combines vehicle design, storytelling, and policy to make the vision credible and actionable.
What We Learned
Trust is fragile and strongly influenced by transparency.
Across desk research, social media analysis, and interviews, skepticism consistently centered on safety, control, and uncertainty around how AVs “decide.” People trusted human drivers more, especially when edge cases or mistakes were involved. Familiarity and exposure helped, but only when AV behavior felt legible and predictable.
Campus behavior is not rule-based, it’s social.
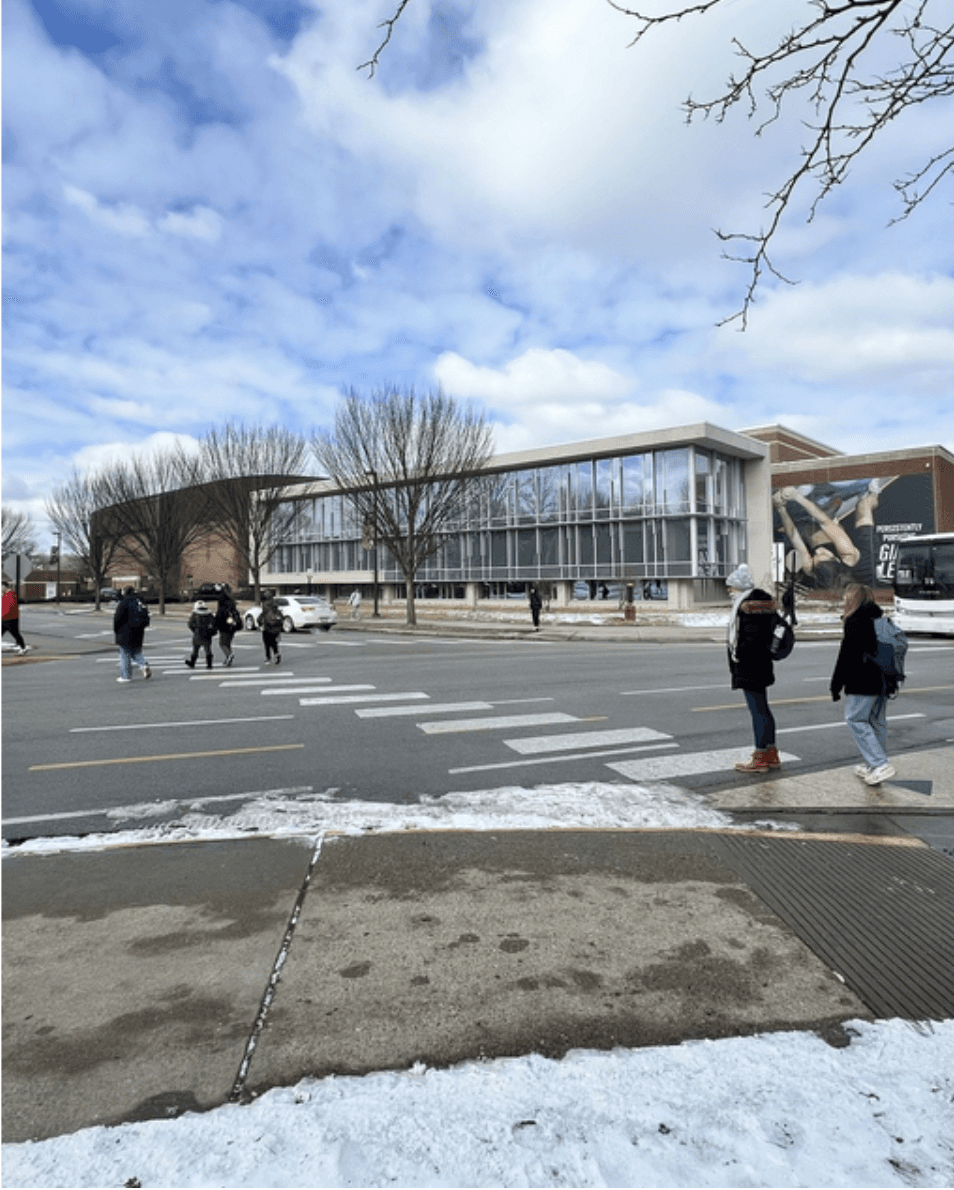
Our surveys and observations showed that many pedestrians feel confident at crosswalks, yet a significant portion still disobey signals. Group influence was a major driver of risky behavior, and vehicle–pedestrian interaction was minimal. In practice, people often move based on what others do—not what the infrastructure says.
Communication must extend beyond the passenger.
One of the biggest gaps we identified was the lack of communication methods for everyone around the AV—especially pedestrians, cyclists, and other drivers. External signaling and intent communication emerged as a major opportunity to improve perceived safety.
The Solution
Instead of producing one “final app,” we delivered a cohesive set of artifacts that work together to answer the core question: how can AVs earn trust and support safer decision-making in campus environments?
Deliverable 1: Ecosystem Map
To understand the full system, we mapped the AV campus ecosystem across awareness, onboarding, usage, and retention. This helped us identify the moments where trust is gained or lost—especially for pedestrians and other vulnerable road users—and clarified where interventions would have the highest impact.
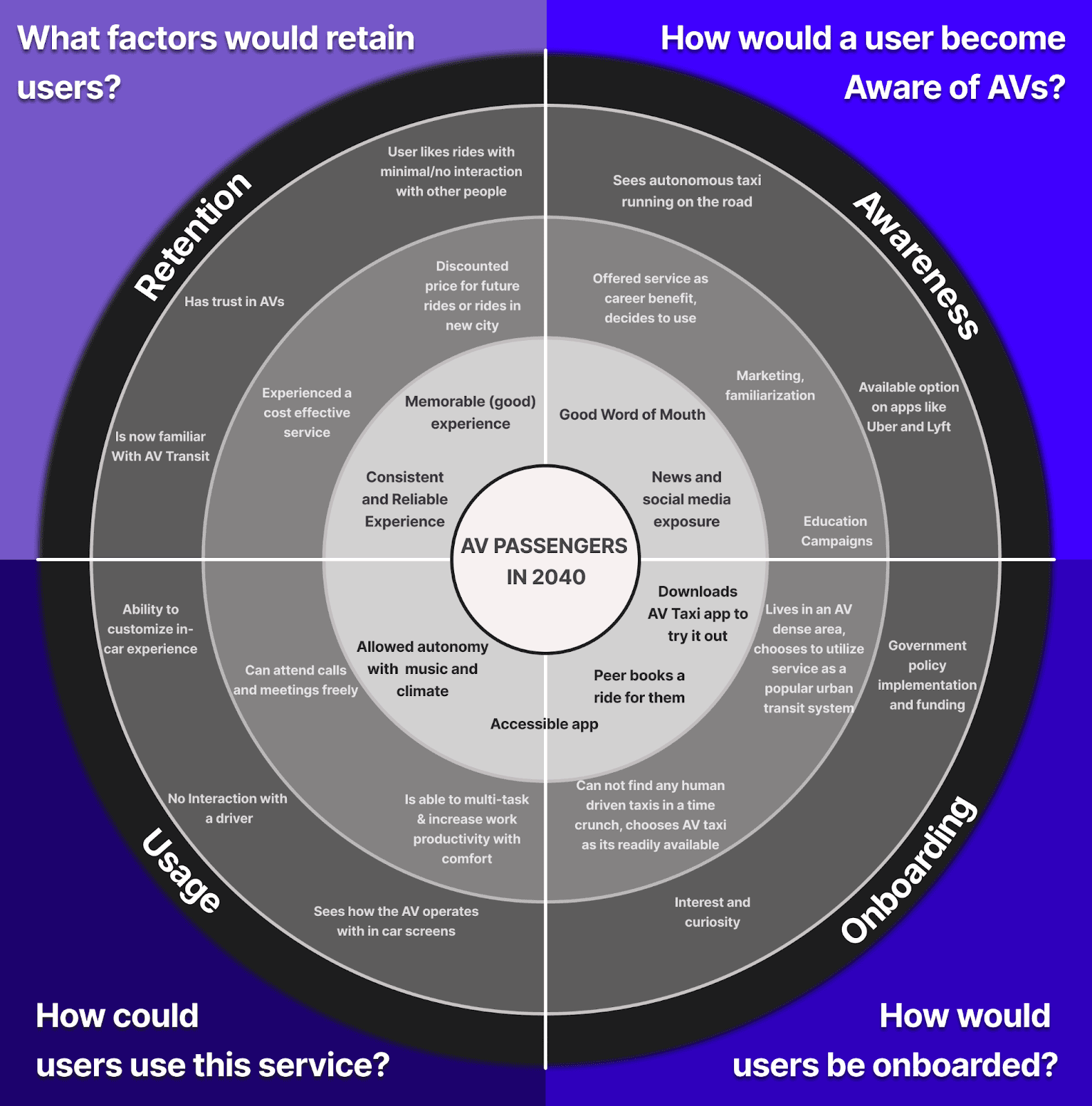
The ecosystem map became the foundation that connected our research to design and policy decisions.
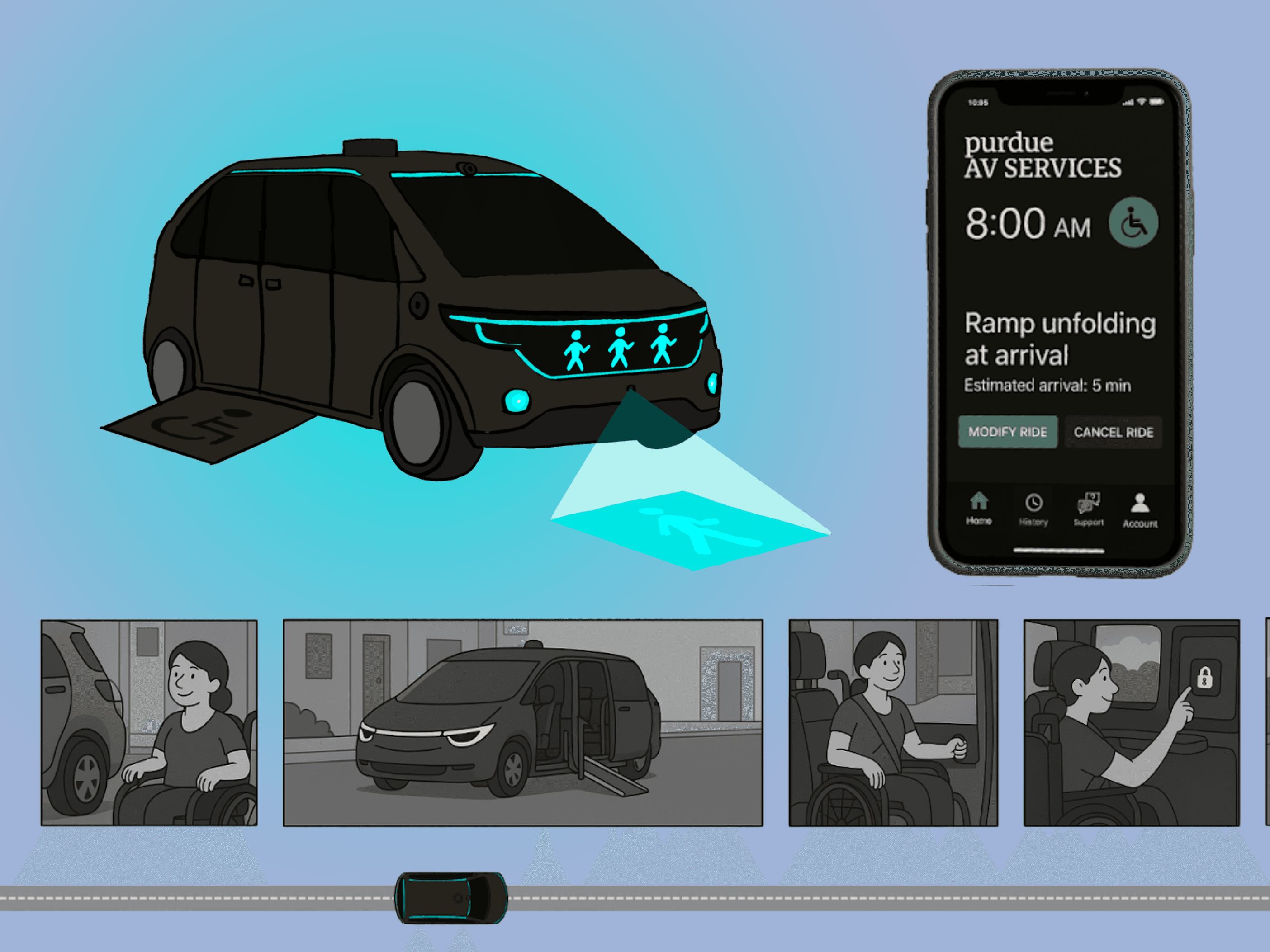
Deliverable 2: 2040 Autonomous Vehicle Prototype (Low–Mid Fidelity)
We designed an “ideal public AV” for campus use in 2040, grounded in real research insights rather than aesthetics alone.
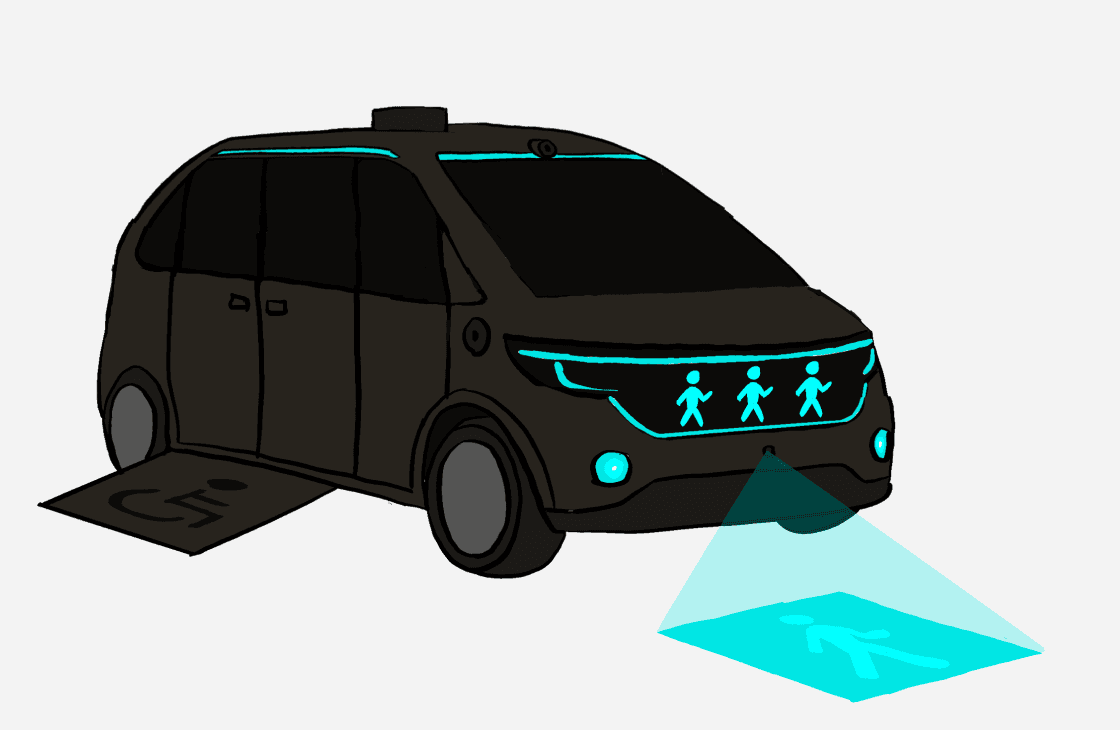
The prototype emphasizes three themes: distinction, communication, and accessibility. It includes visible AV identifiers (such as turquoise lighting and AV-specific plates), sensor fusion for safer perception (cameras + LiDAR), and clear external communication (bumper screens, projected crosswalks, auditory alerts). Inside the vehicle, the experience supports comfort and safety through adaptable seating, transparency features like a driving visualization panel and hazard alerts, and accessibility-forward communication such as HUD cues and haptic feedback.
The goal wasn’t to “predict the future perfectly,” but to propose a vehicle that better matches what campus road users actually need in order to feel safe around autonomy.
Deliverable 3: Design Fiction Vignette
To pressure-test our concept in real life, we created a “day in the life of an AV” vignette set on a college campus. This allowed us to explore how different users like students, visitors, disabled riders, and hesitant adopters would interact with the AV across real campus scenarios.
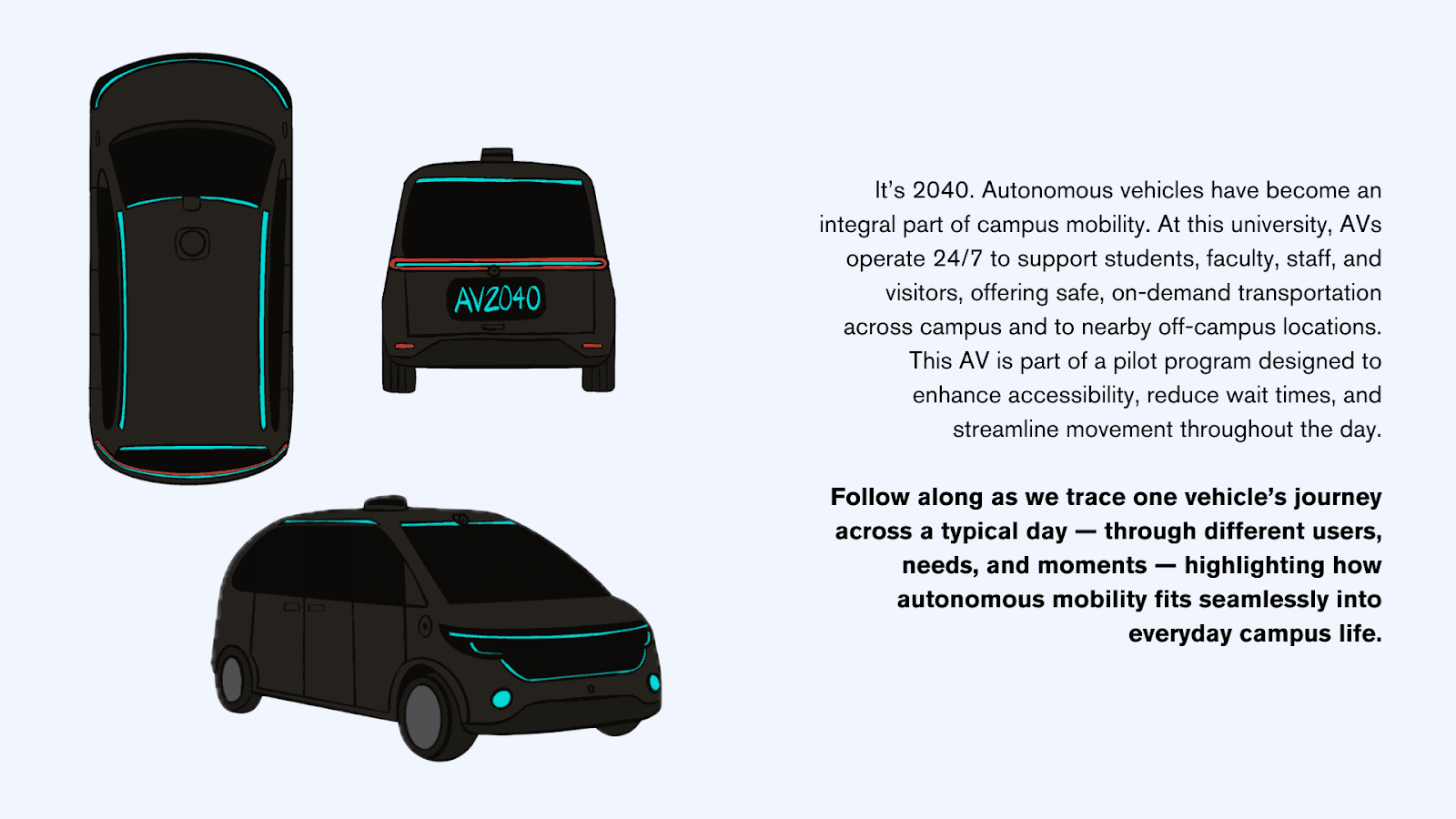
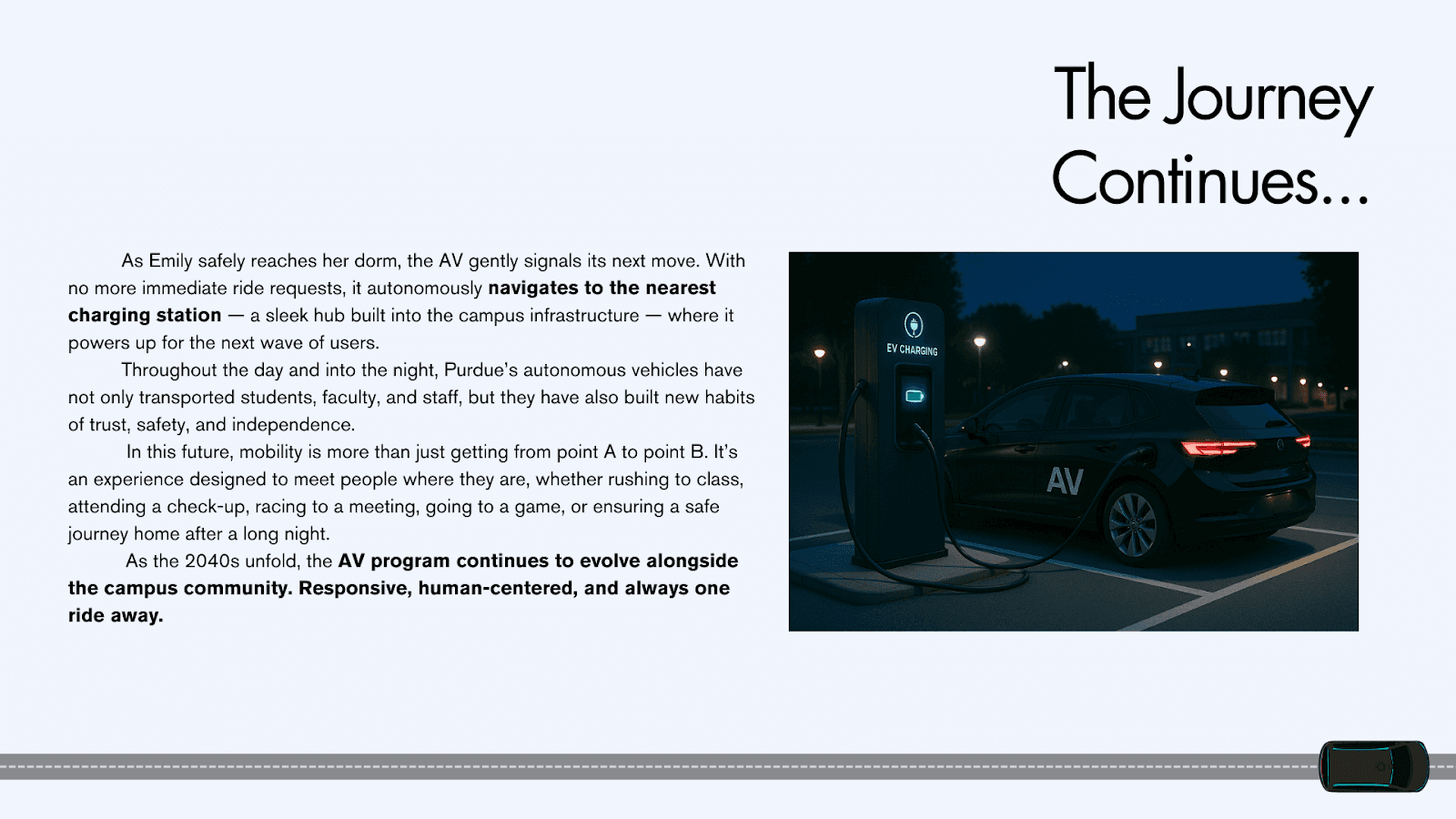
By storytelling through multiple personas, we could show where the vehicle design supports trust, where policy needs to fill gaps, and what emotions the experience might create (confidence, uncertainty, reassurance). This vignette helped make the future state tangible for stakeholders, beyond diagrams and requirements.
Deliverable 4: Policy-Based Solutions (Phased Implementation)
We translated our research into a phased roadmap that bridges vision and feasibility. We compared policy maturity across California, Arizona, and Indiana, then proposed campus-specific policies across three horizons.
In the short term, we focused on accountability and readiness: ID login for AV access, local campus testing requirements, and geofencing during large events. In the medium term, we emphasized safety upgrades and infrastructure support: VRU signaling requirements, sensor fusion/weather readiness, and AV-only lane integration. In the long term, we proposed transformative moves such as nationwide campus standards, smart infrastructure hubs, solar-powered charging networks, and national education requirements for how humans interact safely with AV systems.
This roadmap frames AV adoption as a systems problem, not just a vehicle problem.
Impact
This project delivered a structured, user-centered vision for safer campus autonomy—connecting research, real-world campus behavior, speculative design, and policy into one cohesive system. Rather than treating trust as a “PR issue,” we designed for trust through transparency, communication, accessibility, and phased implementation that could realistically guide future deployment decisions.
What I Learned
This work taught me that in emerging technology spaces, the most valuable design skill is often synthesis—connecting human behavior, policy constraints, and technical reality into decisions that are both bold and grounded. It also reinforced that trust is built through repeated moments of clarity: what the system is doing, why it’s doing it, and what people should do next.
Leading the project also strengthened my ability to mentor designers through ambiguity, align teams across multiple deliverables, and keep storytelling and systems thinking tied to real user needs.
Limitations
Because our region has limited exposure to AVs, it was difficult to interview people with firsthand experience. Our prototype was intentionally low–mid fidelity due to time and tooling constraints, and our vignette used AI-assisted generation for faster iteration, which reduced originality in some visual components. Since the project is exploratory, the outcomes reflect one plausible autonomous future grounded in research-based inference.
Next Steps
Future work could validate findings across different campus types (urban vs college-town), assess the technical feasibility of proposed features and infrastructure, and expand policy research beyond three states to better map state/federal overlaps. APL could also leverage our foundation to run pilot studies or simulations that test AV–VRU interactions in realistic campus scenarios.